
A new article published in *npj Robotics* explores the challenges of flying small quadcopters in ventilation ducts with a maximum diameter of 35 cm. The research, conducted by a team from the French National Institute for Research in Digital Science and Technology (Inria), the French National Centre for Scientific Research (CNRS), the University of Lorraine, and Aix-Marseille University, opens new possibilities for accessibility and detection in confined environments.
Air Ducts: Contemporary Challenges in Safety Inspections
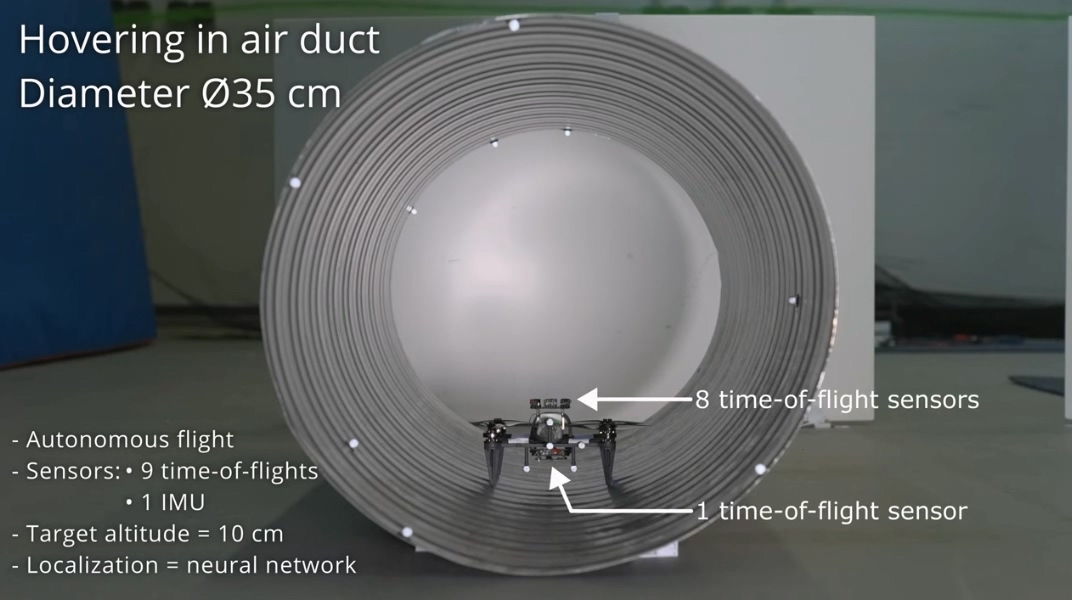
Although air ducts are commonly found in modern buildings and underground networks, inspecting them remains a difficult task due to human inaccessibility. Because the ducts are narrow and cannot support the weight of a person, essential interventions such as maintaining air quality, heating, and air conditioning cannot be carried out. Small quadcopters, with their ability to navigate both horizontally and vertically, offer a potential solution for exploring these ventilation ducts. However, these drones can encounter unstable airflow inside the ducts, which can destabilize their flight or even cause crashes due to severe turbulence caused by their propellers in a tightly confined space.
(Drawing of airflow dynamics inside a circular duct)
Video:
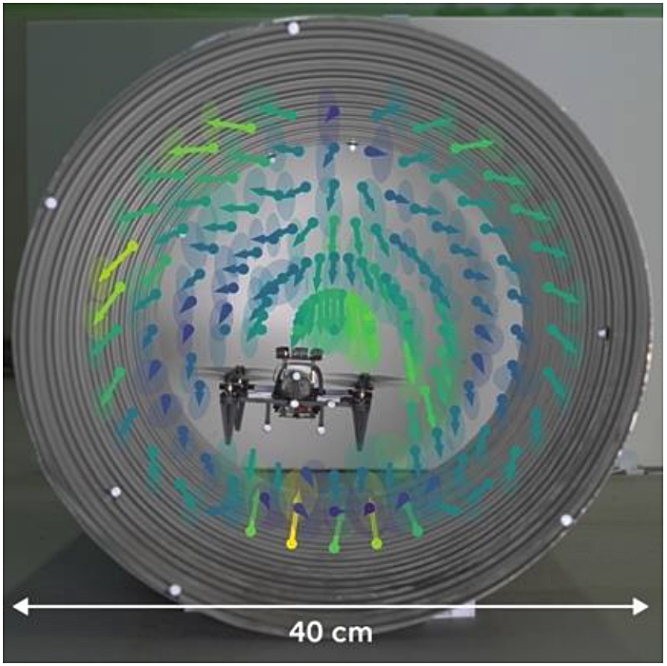
First, the team studied how the airflow changes depending on the position of the drone in the duct. To do this, they used robotic arms and force and torque sensors to measure the forces at hundreds of positions. This initial force “map” clearly demonstrated the complex aerodynamic patterns and was able to identify “danger” areas in the circular duct, where circulating airflow would push the drone toward the duct wall, as well as safer areas where the generated forces would cancel each other out.

Flying and Hovering in Small Ducts with Small Quadcopters
In order to stay at the recommended positions, the drone must be able to identify its location in an environment that is typically dark and lacking in visual cues. The research team combined small lasers and artificial intelligence (neural networks trained on motion capture data) to enable the small drone to hover in areas with minimal turbulence, allowing for safer and more stable flight.
Towards New Application Areas
The results of this research open promising new application areas for drones in industrial inspection and public safety. The next step will be to develop a prototype focused more on payload applications such as cameras, thermal imaging devices, or gas sensors.
This research work is a collaborative result with the Étienne-Jules Marey Institute of Movement Science (Aix-Marseille University / CNRS) and the Design, Manufacturing, and Control Laboratory (University of Lorraine). It reflects the strength of cooperation between various research departments and institutions such as universities in France.